Tech Focus: Real-Time Triggering Using Frame Grabbers
In machine vision systems, precision and control are paramount. From imaging high-speed items on production lines to synchronizing multiple cameras in a multi-sensor system, timing can be crucial.
A critical enabler of this precision is triggering – the process of synchronizing image acquisition with external events. When paired with frame grabbers, triggering becomes a powerful tool that enhances real-time responsiveness and system reliability. For engineers working in machine vision, understanding how triggering works, why it matters, and where it shines, can unlock higher system performance and greater application success.
What is Triggering in Machine Vision?
Triggering in the context of machine vision refers to the method by which an image sensor is instructed to capture a frame in response to a specific event. This event might be the detection of an object by a sensor, the activation of a light gate, or even a signal from an external controller. The key advantage is that image acquisition can be precisely aligned with the occurrence of relevant physical events, avoiding unnecessary data collection and ensuring only meaningful frames are captured.
In a basic system without triggering, the camera may run in free-run mode, continuously capturing images at a set frame rate. While this might suffice for static or slow-moving scenes, it quickly becomes inefficient or even unfeasible when objects are moving rapidly or when precise timing is critical. Triggering introduces determinism and coordination, making the system more efficient and accurate.
How Triggering Works with Frame Grabbers
Frame grabbers regularly play a central role in machine vision systems, particularly when real-time triggering is required. Acting as a bridge between the camera and the host computer, a frame grabber is a dedicated hardware interface that manages high-speed data transfer and advanced synchronization tasks. When used for triggering, frame grabbers offer several critical functions beyond simply transferring data.
First and foremost, frame grabbers provide hardware-level I/O that supports low-latency input and output signaling. These inputs can accept external trigger signals, such as a pulse from a sensor, and immediately relay the command to the camera to initiate image acquisition. In contrast to relying on software-based triggering, which can introduce latency, hardware triggering via frame grabbers enables real-time, deterministic responses.
Many frame grabbers also offer advanced timing capabilities such as programmable delay generators, debouncers, signal conditioning circuits, and encoders.
Programmable delay generators introduce a precise, user-defined time delay between the receipt of a trigger signal and the resulting action (such as image capture). This is useful for compensating for mechanical lag or aligning timing with moving parts.
Debouncers clean up noisy or unstable signals, especially from mechanical switches or sensors, by filtering out rapid, unintended signal changes (bounces) to ensure only a single, clean trigger event is registered.
Signal conditioning circuits adjust and refine incoming signals to make them compatible with the frame grabber’s input requirements. This can include amplification, level shifting, filtering, or isolation to ensure reliable and accurate trigger detection.
Encoders provide pulses for each increment of motion, ensuring that scan lines are captured at precise, regular intervals. This is particularly important in line scan applications, where accurate synchronization between object movement and image acquisition is critical for producing distortion-free images. Encoders often work alongside multiple triggers, which is also essential in line scan setups – for example, one trigger might synchronize line acquisition with conveyor motion, while another could initiate or control exposure – allowing the system to maintain both timing accuracy and flexibility in complex imaging tasks.
These features allow engineers to fine-tune the behavior of triggers to match the dynamics of the application, such as delaying a capture to compensate for mechanical transit time or filtering out noise from a jittery signal.
Additionally, some frame grabbers support multi-camera synchronization, where a single trigger can command multiple cameras to capture images simultaneously or in precisely staggered intervals. This is essential for 3D and volumetric imaging, stereo vision, and other spatially coordinated imaging tasks.
The Importance of Real-Time Triggering
In quality control applications, triggering ensures that images are only captured when a product is in the correct position for inspection. This not only increases inspection accuracy but also reduces the computational load on downstream processing by minimizing the number of unnecessary frames. Real-time triggering also improves system reliability, as it reduces the dependence on software timers and minimizes the risk of dropped frames due to synchronization errors.
Moreover, real-time triggering is essential for implementing complex imaging workflows such as dynamic lighting control, strobe synchronization, or multi-exposure capture. In each case, precise coordination between the camera and other system elements – enabled by the frame grabber – ensures that the resulting images are both usable and meaningful.
Applications That Benefit from Real-Time Triggering
Real-time triggering using frame grabbers finds its strongest use cases in environments where speed, precision, and reliability are non-negotiable. The most prominent areas are industrial automation, inspection and line scan applications where multiple triggers may be used. On high-speed conveyor lines, products move rapidly past vision systems that must inspect for defects, read labels, or measure dimensions. Triggering ensures that each product is imaged at exactly the right moment, synchronized with object presence sensors or encoder pulses that reflect the movement of the line.
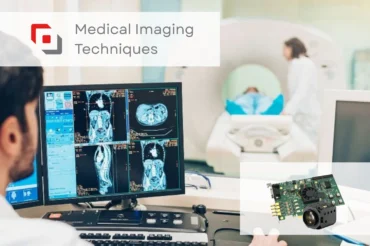
In the semiconductor and electronics industries, AOI, wafer inspection and PCB analysis require sub-micron precision and exact timing. Here, frame grabbers enable synchronization not just of image capture but also of auxiliary components like lighting and laser positioning systems. Triggering allows systems to adapt in real-time to positional variations or production changes.
Another application area is scientific imaging and research, where capturing transient events, such as particle collisions, combustion processes, or biological phenomena, demands nanosecond timing accuracy. In these environments, frame grabbers with high-precision triggering capabilities allow researchers to capture critical frames without resorting to excessive data recording.
Multi-camera systems, such as those used in automotive testing, robotics, or aerial surveillance, also rely heavily on triggering for frame synchronization. Whether performing stereo triangulation or fusing data from different viewpoints, consistent timing across cameras ensures that the composite data set remains coherent and usable.
Triggering with CoaXPress and Camera Link
CoaXPress and Camera Link are two widely used high-speed interfaces in machine vision, both of which support advanced triggering capabilities critical for real-time applications.
CoaXPress (CXP) allows for trigger signals to be embedded directly within the data stream over a single coaxial cable, enabling high-speed image transfer and low-latency control with minimal cabling. This tight integration allows for precise camera control, including hardware triggering and real-time feedback. This results in low trigger latencies (2.88µs) with extremely low jitter (2ns), this is especially valuable in high-throughput inspection systems.
Camera Link also supports robust triggering through its dedicated communication channels, allowing reliable synchronization of image capture with external events or other cameras. However, this does require extra cabling, and cable lengths are limited to around 10m.
Both interfaces are compatible with frame grabbers that offer programmable timing, signal conditioning, and multi-channel synchronization, making them well-suited for demanding environments where deterministic behavior and signal integrity are paramount.
FireBird CoaXPress and Camera Link Frame Grabbers
Active Silicon’s FireBird frame grabbers offer hardware-based I/O control, which allows for ultra-fast, deterministic trigger response. They offer multiple digital I/O lines (often opto-isolated or TTL-compatible), which can be configured for various trigger modes such as edge detection, level sensing, or pulse generation.
Many models include programmable delay generators, debouncing filters, and signal conditioning directly on the board, giving engineers the ability to fine-tune trigger behavior without needing extra hardware. These features are accessible through our comprehensive software development kit, ActiveSDK, which provides low-level control and easy integration into custom software applications.
Our CoaXPress frame grabbers and Camera Link frame grabbers can simultaneously control and synchronize multiple cameras, whether through shared trigger signals or independent, channel-specific configurations. This makes them especially effective in stereo vision, line-scan, and high-speed capture systems. Furthermore, explanatory Technical Notes on using external trigger inputs with the boards can be downloaded from our website.
Need to know more? Get in touch with our vision experts for more details on implementing triggering for your high-speed vision application.